





Грузоподъемные механизмы напольного транспорта

Стандартным рабочим органом грузоподъемного механизма напольного транспортного средства (погрузчика, штабёлера и др.) обычно являются вилы, поскольку именно они наиболее удобны для перегрузки и транспортировки поддонов. Грузоподъемник способен наклоняться вперед-назад из вертикального положения, чтобы груз удобно было взять, а также в целях повышения его устойчивости при перевозке. Для нормальной работы транспортного средства грузоподъемник должен соответствовать определенным требованиям. Должны обеспечиваться:
- принудительная остановка вил в крайнем верхнем положении грузоподъемника и в крайних положениях при наклоне вперед-назад;
- прочность элементов грузоподъемника при поднятии на максимальную высоту груза массой, равной 1,33Q (где Q – номинальная грузоподъемность);
- подъем груза массой 1,2Q на высоту не более 0,3...0,5 м;
- скорость опускания груза при обрыве рукава трубопровода рабочей жидкости не более 0,6 м/с при температуре масла (40±10)° С;
- самопроизвольное опускание груза со скоростью не более 10 мм за 10 мин при температуре масла 25...40° С;
- достаточная видимость трассы и зоны обработки груза при движении и взятии груза.
![[b]Рис. 1. Кинематические схемы грузоподъемных механизмов:[/b]<br /> [b]а[/b] – двухрамного со свободной рабочей высотой подъема вил: 1 – вилы; 2 – подвижная рама; 3 – неподвижная рама; 4 – плунжер гидроцилиндра; 5 – наружный цилиндр; 6 – внутренний цилиндр; 7 – балансир; [i]H[/i] – максимальная высота подъема вил; [i]H[sub]0[/sub][/i] – величина свободного хода вил;<br /> [b]б[/b] – трехрамного со свободной рабочей высотой подъема вил: 1 – вилы; 2 – подвижная рама; 3 – неподвижная рама; 4 – плунжер гидроцилиндра; 5 – наружный цилиндр; 6 – внутренний цилиндр; 7 – блок; 8 – средняя рама; [i]H[/i] – максимальная высота подъема вил; H[sub]0[/sub] – величина свободного хода вил; <br />[b]в[/b] – трехрамного с промежуточной рамой: 1 – вилы; 2 – подвижная рама; 3 – неподвижная рама; 4 – шток гидроцилиндра; 5 – одноходовой цилиндр; 6 – полиспаст; 7 – промежуточная рама](/article/10065-gruzopodemnye-mehanizmy-napolnogo-transporta/Images/01.jpg)
Простейшая схема грузоподъемного механизма показана на рис. 1, а. Грузоподъемный механизм состоит из вил 1 с кареткой для их крепления; подвижной рамы 2; неподвижной рамы (наружной) 3; гидроцилиндра, в свою очередь состоящего из наружного цилиндра 5 и внутреннего цилиндра 6 с плунжером 4; цепи; балансира 7 с роликами для цепей. Гидроцилиндр крепится к нижнему основанию наружной рамы через сферический подшипник. На штоке гидроцилиндра закреплен балансир с двумя роликами для направления движения цепей. Каретка снабжена четырьмя роликами для перемещения ее по направляющим грузоподъемника и восприятия нагрузок, действующих перпендикулярно плоскости рамы, и четырьмя роликами для восприятия нагрузок, действующих в плоскости рамы. При подаче масла в полость гидроцилиндра начинает движение шток, который, действуя на балансир через цепи, приводит в движение каретку. Скорость движения каретки при этом вдвое больше скорости движения штока.
Максимальная высота подъема вил Н определяется расстоянием от уровня пола до нижней поверхности вил, поднятых на максимальную высоту при вертикальном положении грузоподъемника. Важным параметром является и так называемая строительная высота грузоподъемника, которая определяется расстоянием от уровня пола до верхней точки установленного вертикально грузоподъемника при полностью опущенных вилах. Большинство конструкций грузоподъемников погрузчиков разных производителей обеспечивают подъем вил на величину свободного хода (в табличных характеристиках погрузчиков этот параметр обозначается h2 или free lift). Транспортный свободный ход грузоподъемника, т. е. та высота, на которую необходимо поднять паллету, чтобы ее можно было беспрепятственно перевозить, для большинства моделей составляет 80...300 мм. Есть модели с рабочим свободным ходом вил 1 200...1 500 мм. Наличие у модели рабочего свободного хода является необходимым условием для использования ее на железнодорожных станциях или в портах, поскольку позволяет свободно применять погрузчик для работ внутри грузовых контейнеров или вагонов с поддонами, расположенными во втором ярусе. В зависимости от числа рам и высоты подъема вил без увеличения строительной высоты грузоподъемника различают типы грузоподъемников, показанные на рис. 2.
Кинематическая схема двухрамного грузоподъемника со свободной высотой подъема вил показана на рис. 1, а. При подаче масла в гидроцилиндр начинает движение наружный цилиндр 5, который поднимает вилы 1 посредством цепей, перекинутых через ролики балансира 7, закрепленного на цилиндре 5. В этом случае скорость движения вил оказывается вдвое больше скорости внутреннего цилиндра 6. После окончания хода наружного цилиндра по внутреннему начинается вторая ступень – выдвижение внутренней рамы 2 за счет силового действия цилиндра 5, который продолжает движение с внутренним цилиндром относительно плунжера 4, закрепленного на наружной раме. Скорость движения вил на второй ступени равна скорости движения наружного цилиндра.
![[b]Рис. 2. Схемы грузоподъемников:[/b] а – двухрамного без свободной высоты подъема вил; б – двухрамного со свободной высотой подъема вил; в – трехрамного без свободной высоты подъема вил; г – трехрамного со свободной высотой подъема вил](/article/10065-gruzopodemnye-mehanizmy-napolnogo-transporta/Images/03.jpg)
В трехрамном грузоподъемнике наибольшее применение получила схема подъема вил, показанная на рис. 1, в. Помимо основных элементов, изображенных на рис. 1, а, данная схема включает промежуточную раму 7. Одноходовой цилиндр 5 закреплен на неподвижной наружной раме 3. Шток 4 гидроцилиндра, воздействуя на среднюю раму 7, поднимает ее вместе с закрепленным на ней полиспастом 6. Внутренняя рама 2 с блоком получает движение от цепи, перекинутой через блок, со скоростью вдвое большей, чем скорость штока 4. Одновременно с движением внутренней рамы с закрепленным на ней блоком за счет действия цепи, связанной одним концом с кареткой, а вторым концом – со средней рамой 7, движутся вилы 1. Скорость движения вил вдвое больше скорости движения внутренней рамы 2 и вчетверо больше скорости движения штока 4 гидроцилиндра.

Трехрамный грузоподъемник со свободной высотой подъема вил изображен на рис. 1, б. Подъем вил 1 на свободную высоту осуществляется наружным цилиндром 5 при помощи цепи, перекинутой через блок 7, закрепленный на цилиндре 5. Выдвижение внутренней рамы происходит одновременно с выдвижением средней рамы 8. Внутренняя рама выдвигается за счет действия второй ступени 6 гидроцилиндра. При перемещении рамы 2 с помощью цепи, перекинутой через блок 7, который закреплен на средней раме 8, движется рама 8.
В типовой конструкции двухрамного грузоподъемника (высота подъема 2,0...2,8 м) наружная рама выполнена неподвижной, внутренняя – подвижной, имеется цилиндр подъема одностороннего действия и две цепи каретки. Внутренняя рама перемещается по роликам вдоль наружной рамы. Эксцентриковая ось боковых роликов позволяет регулировать боковые зазоры между роликами и рамами. Натяжение цепей регулируют с помощью тяг, разницу в натяжении компенсирует балансир, закрепленный на оси каретки.
У типового трехрамного грузоподъемника (высота подъема до 4,5 м) наружная рама неподвижная, средняя и внутренняя – подвижные. У каретки две цепи, у средней рамы – одна. Цилиндр подъема выполнен двухступенчатым одностороннего действия. Натяжение цепей регулируют с помощью тяг, разницу в натяжении цепей каретки компенсирует балансир.
Двухрамные и трехрамные грузоподъемники крепят шарнирно на кожухах полуосей ведущего моста. К корпусу электропогрузчика они присоединены цилиндрами наклона.
Подъем вил и наклон грузоподъемника у погрузчика обеспечивает гидравлическая система, куда входят масляный бак, насос, гидрораспределитель, цилиндры подъема и наклона грузоподъемника, трубопроводы. Гидросистема приводится в действие при помощи гидрораспределителя, электрически сблокированного с электродвигателем подъема. При включении гидросистемы на наклон или подъем одновременно включается электродвигатель механизма подъема, который, приводя в действие насос, создает необходимое давление рабочей жидкости. Гидрораспределитель оборудован редукционным клапаном, отрегулированным на определенное давление.
Опускается грузоподъемник под действием груза или только каретки с вилами, без включения электродвигателя подъема. Рабочая жидкость из цилиндров поступает по трубопроводам в полость низкого давления гидрораспределителя, откуда по шлангу сливается в бак через масляный фильтр. К цилиндру подъема рабочая жидкость подводится через дроссель постоянного расхода, который обеспечивает опускание вил погрузчика с минимальными отклонениями скорости от номинальной величины независимо от нагрузки на вилы, а также опускание груза со скоростью, близкой к рабочей, при аварийном обрыве рукава трубопровода, подводящего рабочую жидкость к цилиндру подъема.
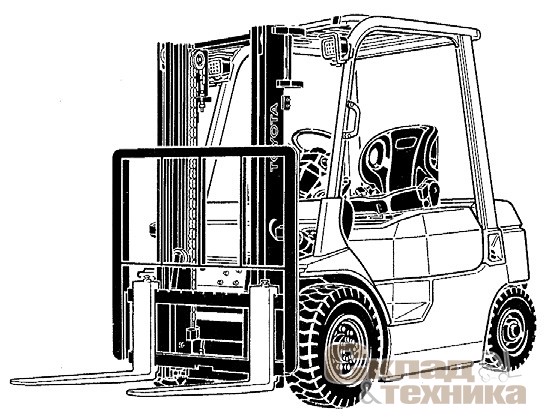
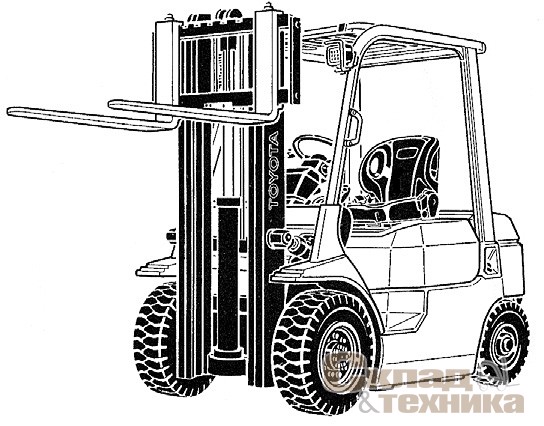
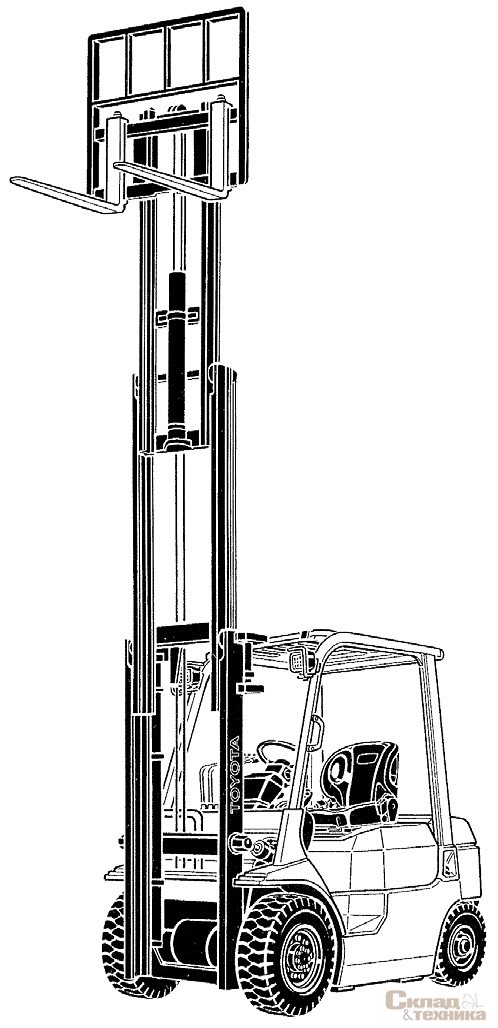
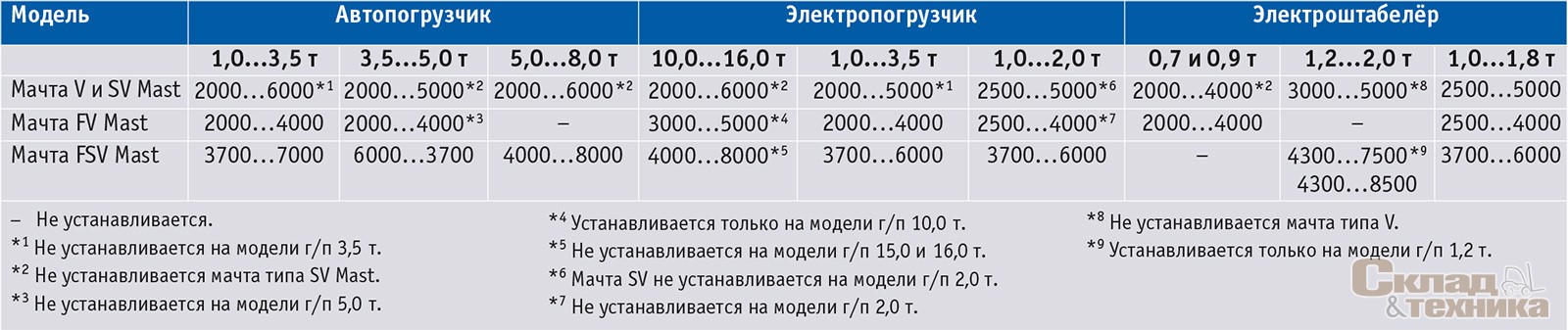
Удачной иллюстрацией использования грузоподъемных механизмов разных типов в конструкциях погрузчиков и электроштабелёров различной грузоподъемности являются модели компании Toyota. Конструкция стандартной двухсекционной «широкой» мачты типа V (рис. 3) обеспечивает наилучший передний обзор зоны обработки груза из кабины оператора погрузчика. Эта мачта используется для выполнения самого широкого круга задач при достаточно больших рабочих площадях на складе. На рис. 4 представлена конструкция двухсекционной мачты типа FV со свободным рабочим ходом вил. Большая величина свободного хода позволяет эффективно использовать пространство склада и делает применение этой модели оптимальным в том случае, когда необходимо штабелировать груз до самого потолка. Эта мачта предназначена для использования в низких складских помещениях, в контейнерах и трюмах кораблей. Трехсекционная мачта типа FSV со свободной рабочей высотой подъема (рис. 5) используется для заполнения грузами помещения с потолками высотой более 5 м. Погрузчик с таким грузоподъемником эффективен при работе в складских помещениях с низким входом-выходом или на ограниченных площадях. В таблице представлены сведения о грузоподъемниках, которые используются на различных моделях вилочных погрузчиков Toyota последних серий.