







Новые перспективы для изготовителей транспортных автоматических систем
Системы навигации для робокаров
Сегодня совершенствование технологии производства робокаров, особенно их навигационных систем, продолжается. Навигационные системы, использующие провода в полу, по-прежнему применяют, но уже разработано и активно внедряется большое число более гибких беспроводных технологий навигации.
Современные автоматические транспортные средства (ТС) оборудованы сложными бортовыми компьютерами, обеспечивающими передачу-прием данных, управляющими движением и действиями робокаров, могут иметь несколько платформ для размещения разных грузов и дополнительные системы манипулирования ими – подъемники для изменения уровня «палубы» робокара, приводные или неприводные конвейеры для передачи груза на другие транспортные средства, технологическую линию или автоматизированный склад.
В настоящее время для управления AGV-системами помимо проводных используются инерционные, лазерные, «сеточные» и «химические» методы навигации.
Инерционные навигационные системы разработаны в начале 1990-х годов и базируются на использовании гироскопов, точно таких же, как в системах управления самолетами и крылатыми ракетами. Гироскоп мгновенно обнаружит малейшие изменения в отклонении ТС от заданного курса, зафиксированного в точной карте, которая есть в памяти каждого ТС. Бортовой компьютер постоянно сравнивает информацию, поступающую от гироскопа и датчиков скорости, с трассой, отмеченной на карте, и делает необходимую коррекцию курса. Обычно инерционные навигационные системы обеспечивают максимальное отклонение от заданной «дорожки» не более 2,5 см в каждую сторону. Чтобы предотвратить возможные отклонения от курса, правильность выполняемых по карте движений периодически проверяется с помощью дополнительно установленных в полу маленьких маркеров.
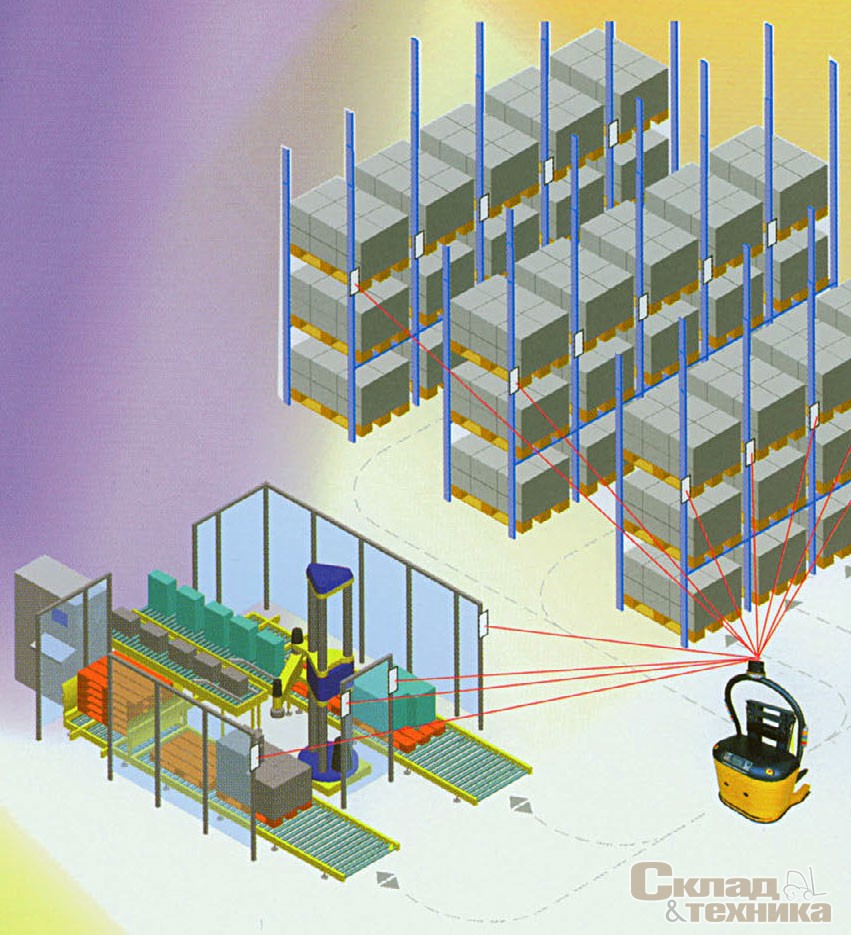
Принцип действия первых лазерных навигационных систем, разработанных в начале 1980-х годов, основался на методе целевой триангуляции (разбивка окружающего пространства на треугольники). Транспортное средство оборудовали вращающимся лазерным маяком, установленным примерно на уровне 2 м от пола. Этот маяк, вращаясь на 360°, «просматривает» специально установленные «метки» вокруг ТС на колоннах, стенах и т. п. препятствиях. Обычно «метки» располагают на расстоянии 6...9 м с обеих сторон трассы, чтобы обеспечивалась достаточная навигационная поддержка. Измерение углов отражения от этих целей относительно ТС позволяет разбить окружающее его пространство на треугольники. Полученная сетка сопоставляется с картой помещения в памяти транспортного средства, позволяя точно определить его положение. Лазерная система навигации дополняется бортовыми датчиками скорости, что обеспечивает точность отслеживания курса приблизительно ±2,5 см. Сочетание точности управления и гибкости в лазерных системах навигации сделало их самыми популярными для управления робокарами. По данным компании FMC Technologies Automated Systems, в 2006 году робокары использовались в 43% всех AGV-систем, изготовленных в Европе, и в 57% систем, созданных в США.

В так называемой «сеточной» системе навигации для управления движением AGV используются ряды специальных меток, которые фиксируются датчиками. Такими метками могут служить встроенные в пол магниты, провода, RFID-теги, окрашенные плитки и т. п. AGV-устройства контролируют по этой «сетке» свое местонахождение, сравнивая его с маршрутом, заданным в бортовой памяти.
«Химические» системы навигации основаны на оптическом контроле трассы. Обычно в этом случае используется наносимая на поверхность пола химическим способом линия, невидимая в обычных условиях, но заметная при освещении специальным прибором, находящимся под транспортным средством. Отраженный от линии свет фиксируется видеокамерой, которая передает эту информацию в бортовой компьютер, выполняющий коррекцию курса. Навигационные системы этого типа невозможно использовать, если трассы одного или разных транспортных средств пересекаются, поэтому их обычно не устанавливают на робокарах, используемых на заводах или складах.
Ситуация на рынке систем с робокарами
Важной составляющей прогноза будущего развития рынка является знание его структуры в настоящем и в прошлом. Отделение планирования и управления складскими и транспортными системами университета Лейбница в Ганновере (РSLT) на протяжении уже 19 лет собирает банк данных по складским и транспортным системам, использующим робокары. Ежегодно в него поступают сведения по вводу в эксплуатацию решений с робокарами европейских производителей – это информация о числе робокаров в каждой системе, их типе, протяженности рабочей трассы, используемых в них концепции энергоснабжения и принципе навигации. Все данные передают сами изготовители техники. Начиная с этого времени и до конца 2006 года сектором РSLT зафиксировано введение в эксплуатацию более 3300 автоматических транспортных систем, в которых использовано свыше 31 тыс. робокаров. За последние десять лет отмечен непрерывный рост внедрений транспортных систем с робокарами (график 1).

Так, в 1996 году отмечено примерно сто реализованных решений. До 2006 года, который стал рекордным, ежегодно вводилось в эксплуатацию примерно от 100 до 160 систем. Похожая ситуация складывается и с количеством ежегодно реализуемых робокаров (график 2): в 1996 году было продано около 450 ед. этого оборудования, а спустя десять лет поставки увеличились до 1100 новых робокаров. В настоящее время существующие возможности изготовителей транспортных систем в значительной мере исчерпаны, и сроки поставки техники увеличиваются.

В 2006 году автомобильная промышленность значительно опередила другие отрасли по количеству внедрений и систем с робокарами, и самих робокаров. За ней следуют типографии, предприятия целлюлозно-бумажной промышленности и больницы. Как видим, автомобилестроение, являясь основным потребителем систем с робокарами, вновь выступает в роли основного двигателя прогресса и развития в области автоматизации. Эта отрасль одновременно и определяет основные тенденции в конструировании и применении транспортных систем с робокарами, и стимулирует инновации в них. Правда, по сравнению с предыдущими годами можно отметить явную смену стратегии их использования. Системы со ста и большим числом робокаров едва ли потребуются в дальнейшем. Чаще всего среднее количество единиц транспортного оборудования, задействованного в одной автоматической системе в автомобильной промышленности, по данным журнала F+H, составляет примерно одиннадцать, что обеспечивает большую гибкость производства и минимальные риски. За пределами этой отрасли среднее число робокаров в новых транспортных системах, по оценкам F+H, на 2006 год составило около семи единиц, а в Америке стало обычным использование еще меньшего числа робокаров в одной транспортной системе (по данным журнала ММН) – от двух до шести.

Глобализация – стимул успеха
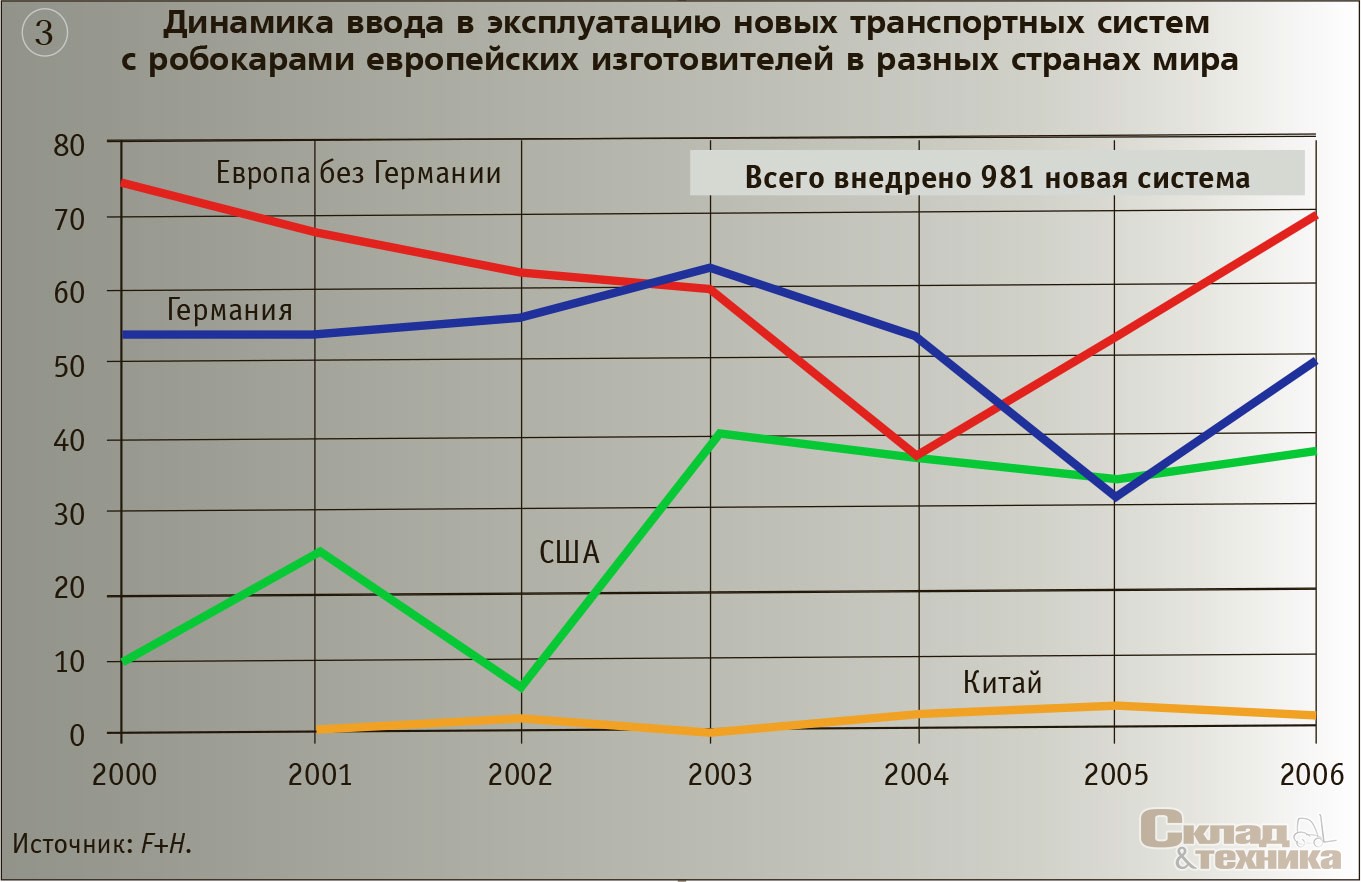
До 2000 года внедрение транспортных систем с робокарами европейских изготовителей концентрировалось в основном на рынках стран этого региона. С начала миллениума интерес к этим решениям резко возрос и на североамериканском рынке, и начиная с 2003 года количество внедренных здесь систем европейских изготовителей приблизилось к потенциалу немецкого рынка (график 3). Так, в 2006 году в Северной Америке ввели в эксплуатацию почти сорок новых систем с робокарами европейских изготовителей. Эксперты с всевозрастающим интересом следят и за китайским рынком. Системы с робокарами в этой стране также нашли своих потребителей и многочисленные области применения. Китайские изготовители транспортных систем с робокарами с целью копирования и приобретения необходимого опыта по эксплуатации уже реализовали немало таких устройств. В последние годы при содействии европейских изготовителей в КНР ежегодно вводили в эксплуатацию до пяти автоматических транспортных систем с робокарами. Вне сомнений, здесь также формируется рынок, который пока находится в стадии развития, но в будущем может предоставить европейским компаниям-производителям большие потенциальные возможности.
Поскольку даже в странах с невысоким уровнем оплаты труда уровень надежности выполнения технологических процессов должен неизбежно повышаться, можно с уверенностью сказать, что спрос на качественные автоматизированные установки здесь будет расти и дальше. Поддержку европейским изготовителям транспортных систем с робокарами в анализе рынка, логистике и планировании призван оказать основанный в 2006 году Интернациональный Логистический Центр (International Logistics Centre), офисы которого находятся в Ганновере (ФРГ) и в Нанкине (КНР). Центр является совместным проектом проф. Шульце (Schulze) из университета Лейбница в Ганновере и проф. Чжао (Zhao) из Юго-Восточного университета в Нанкине.
| Компания | Тип робокаров | ||||||
|---|---|---|---|---|---|---|---|
| Транспорти-ровщики штучных грузов | Вилочный напольный транспорт | Для перевозки тяжелых и габаритных грузов | Тягачи и букси-ровщики | Тележки и иной транспорт для перевозки легких грузов | Комплек-товщик заказов | Устрой-ства типа «шаттл» | |
| Amerden, Inc. | x | x | x | x | x | ||
| AutoMotion Systems | x | ||||||
| AGV Products, Inc. | x | x | x | ||||
| Creform Materials Handling Systems |
x | ||||||
| Daifuku America Corporation | x | x | x | x | |||
| Dematic | x | x | x | ||||
| Egemin Automation, Inc. | x | x | x | x | x | ||
| Electtric 80 | x | x | x | ||||
| FMC Technologies | x | x | x | x | x | x | |
| Frog Navigation Systems | x | x | x | x | |||
| HK Systems | x | x | x | ||||
| Jervis B. Webb | x | x | x | x | x | ||
| Kiva Systems | x | ||||||
| Muratec USA | x | x | x | ||||
| Ocme America Corporation | x | ||||||
| RMT Robotics | x | ||||||
| Swisslog | x | ||||||
| Transbotics | x | x | x | x | x | ||
Перспективы
В будущем установки транспортных систем с робокарами все шире станут использоваться в качестве элементов автоматизации производства и логистики. Новые области применения, определяющие характер инноваций, и положительные отзывы клиентов стимулируют внедрение таких технологий. Решения будут реализованы в виде «островов» автоматизации с определенными масштабами охвата. В этой связи решающую роль играет высокий уровень гибкости и управляемости систем. Уже сегодня ни один производственник не может отказаться от рассмотрения транспортных систем с робокарами в качестве возможной альтернативы используемому технологическому оборудованию, а в дальнейшем по мере снижения их стоимости и роста функциональных возможностей аргументы в их пользу станут еще более весомыми.

